









Wil je dat je robot precies weet waar alles is en soepel beweegt? Met ROS TF2 leer je frames en transforms slim opzetten, visualiseren en debuggen-van map, odom en base_link tot camera’s en robotarmen-zodat sensordata, navigatie en manipulatie naadloos samenwerken. Met praktische tips, valkuilen en tools als RViz, tf_echo en robot_state_publisher bouw je snel een stabiele, betrouwbare tf-tree.
Wat is TF en TF2 in ROS
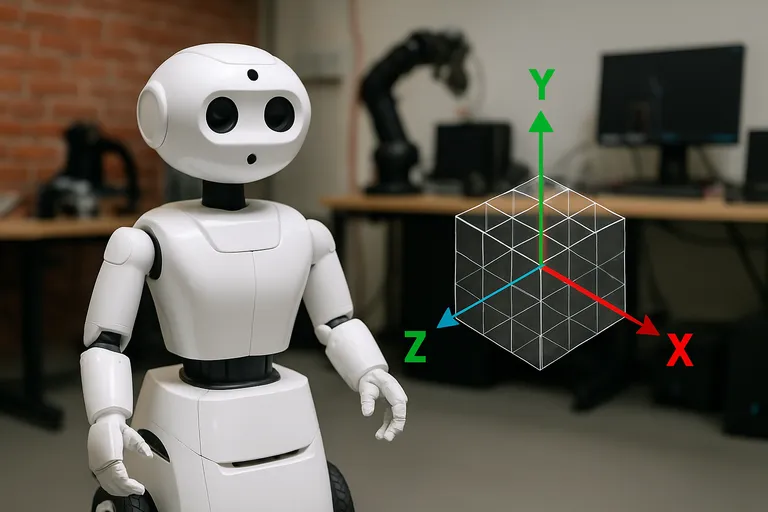
tf en tf2 zijn de ROS-bibliotheken die je robot laten bijhouden waar alles zich bevindt ten opzichte van elkaar, zowel in ruimte als in tijd. Je werkt met frames: dat zijn coördinatenstelsels gekoppeld aan onderdelen zoals base_link, camera_link of odom. Een transform beschrijft de verschuiving (translatie) en draaiing (rotatie, vaak als quaternion zodat je geen last hebt van gimbal lock) tussen twee frames. Al die relaties samen vormen een tf-tree met parent-child verbindingen, waardoor je op elk gewenst tijdstip kunt uitrekenen hoe een punt in het ene frame eruitziet in een ander frame. Transforms kunnen dynamisch zijn (bijvoorbeeld de beweging van het chassis) of statisch (zoals de vaste offset van een camera); in ROS worden die doorgaans gepubliceerd op /tf en /tf_static met een tijdstempel, zodat je sensorfusie, navigatie, SLAM en manipulatie consistent kunt uitvoeren.
tf2 is de moderne opvolger van tf met een heldere API, expliciete buffers, betere thread-safety en performance, en is de standaard keuze voor nieuwe projecten in ROS 1 én in ROS 2. In de praktijk publiceer je transforms via een broadcaster en lees je ze via een listener die een buffer bijhoudt, zodat je stabiel kunt “time-travelen” naar het juiste moment van je sensordata. Kies dus voor tf2, zorg voor een eenduidige root in je tf-tree, publiceer vaste relaties als statisch en stempel alles consequent met de juiste tijd.
Waarom coördinatentransformaties onmisbaar zijn
Zonder coördinatentransformaties praat elke sensor op je robot in zijn eigen taal en raak je direct het overzicht kwijt. Je camera levert pixels in camera_link, je lidar punten in laser_frame en je planner verwacht alles in base_link of map. Door consistente transforms te gebruiken, vertaal je al die gegevens naar één referentie zodat detectie, lokalisatie en navigatie op elkaar aansluiten. Je kunt dan bijvoorbeeld een gedetecteerd object vanuit de camera meteen als doel voor je arm in base_link plaatsen, of een lidar-obstakel correct projecteren op je kaart.
Tijd speelt daarbij mee: door transforms met tijdstempels te gebruiken, match je metingen uit verschillende momenten en voorkom je schijnbare fouten door vertraging. Het resultaat is stabielere sensorfusie, betrouwbaardere trajectplanning en veiliger gedrag in dynamische omgevingen.
TF VS TF2: wat gebruik je in ROS 1 en ROS 2
Deze tabel laat beknopt zien hoe TF en TF2 zich tot elkaar verhouden en welke je gebruikt in ROS 1 versus ROS 2, zodat je voor je tf-robot workflows de juiste API en tools kiest.
| Aspect | TF (ROS 1) | TF2 in ROS 1 | TF2 in ROS 2 |
|---|---|---|---|
| API/bibliotheek | tf package; tf::TransformListener / tf::TransformBroadcaster (legacy) | tf2 + tf2_ros; Buffer/TransformListener/TransformBroadcaster; tf2_geometry_msgs | tf2 + tf2_ros (rclcpp/rclpy); dezelfde Buffer/Listener/ Broadcaster API |
| Topics & statische transforms | Alleen /tf; statische transforms meestal periodiek gepubliceerd | /tf (dynamisch) + /tf_static (gelatcht, éénmalig); tf2_msgs/TFMessage | /tf + /tf_static (gelatcht); “static_transform_publisher” publiceert éénmalig |
| Tijd/buffering & thread-safety | Cache ~10s; minder strikte tijdssemantiek en thread-safety | BufferCore met configureerbare cache (~10s), betere time handling en thread-safety | Zelfde tf2-kern; thread-safe, DDS-ready timing; message filters via tf2_ros |
| Aanbevolen gebruik | Alleen voor legacy ROS 1 code; niet beschikbaar in ROS 2 | Aanbevolen voor nieuwe ROS 1 pakketten en migraties | Enige optie; standaard voor alle ROS 2 projecten |
| Tools & compatibiliteit | RViz, tf_echo, view_frames (ROS 1); geen ROS 2-compatibiliteit | Werkt met RViz, tf_echo, view_frames; drop-in vervangers voor tf | RViz2, tf2_echo, tf2_tools view_frames.py; middleware-agnostisch |
Conclusie: gebruik TF2 overal waar mogelijk-het is de standaard in ROS 2 en de aanbevolen keuze in ROS 1; TF blijft uitsluitend relevant voor onderhoud van legacy ROS 1 code.
In ROS 1 is tf de oudere bibliotheek en tf2 de moderne opvolger met een duidelijkere API, expliciete buffers en betere performance. In de praktijk kies je in ROS 1 bijna altijd voor tf2 (via tf2_ros) en gebruik je alleen tf als je vastzit aan legacy packages. tf2 werkt met TransformStamped berichten, scheidt het berekenen (Buffer/BufferCore) van het ophalen (TransformListener) en gaat beter om met tijd, wat je debugging en betrouwbaarheid helpt.
In ROS 2 is de keuze simpel: je gebruikt uitsluitend tf2; tf bestaat daar niet meer. Je publiceert dynamische transforms met tf2_ros::TransformBroadcaster en vaste relaties met StaticTransformBroadcaster, beide op /tf en /tf_static. Kortom: bouw nieuw werk in tf2 en migreer waar kan weg van tf.
[TIP] Tip: Gebruik tf2; houd robot-framehiërarchie consistent en tijdgesynchroniseerd voor alle sensoren.
Kernbegrippen en frames in je TF-tree
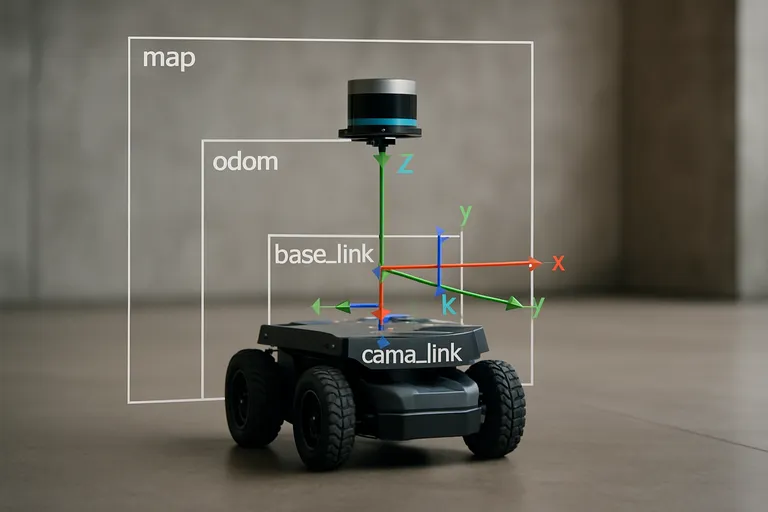
Een tf-tree beschrijft hoe alle coördinatenstelsels (frames) van je robot en omgeving zich tot elkaar verhouden. Elk frame is een 3D referentie, bijvoorbeeld map (wereld), odom (lokale odometrie), base_link (het robotlichaam) of camera_link en imu_link voor sensoren. De verbindingen tussen frames zijn transforms: een positie (meters) en oriëntatie als quaternion (radianen), met een parent-child richting. Samen vormen ze een gerichte, acyclische boom met één duidelijke root, vaak map of odom. Dynamische transforms (zoals base_link->odom) veranderen continu en worden op /tf gepubliceerd; vaste relaties (bijvoorbeeld camera_mount->camera_link) zet je als statisch op /tf_static.
Dankzij tijdstempels kun je “terug in de tijd” transformeren zodat metingen uit verschillende momenten netjes op elkaar aansluiten in de tf2-buffer. Hanteer consistente namen en assen volgens REP-103 (x vooruit, y links, z omhoog) om verwarring te voorkomen. Kies een heldere keten, bijvoorbeeld map->odom->base_link->sensorframes, vermijd loops en dubbelzinnige paden, en gebruik base_footprint als je een vlakke, grondgeprojecteerde variant van base_link nodig hebt voor planning of voetcontact.
Veelgebruikte frames en parent-child relaties
In je tf-tree kom je steeds dezelfde patronen tegen: map als wereldreferentie, odom voor lokale odometrie en base_link als het robotlichaam. Daaronder hangen sensorframes zoals camera_link, imu_link en laser_frame, en soms base_footprint als vlakke projectie van base_link voor planners. De parent-child relatie vertelt welke transform je publiceert: je definieert de pose van het child ten opzichte van de parent, bijvoorbeeld base_link als child van odom, of camera_link als child van base_link.
Voor manipulators loopt de keten door naar joint- en end-effectorframes zoals tool0. Houd één duidelijke root (vaak map), laat elk frame één parent hebben en publiceer vaste offsets als statisch. Zo blijft je tf-tree uniek, consistent en goed te debuggen in tijd.
Statische versus dynamische transforms
Statische transforms beschrijven vaste relaties tussen frames die niet veranderen, zoals de montage-offset tussen base_link en camera_link of de positie van een lidar op je chassis. Je publiceert ze één keer via een StaticTransformBroadcaster op /tf_static; ze zijn latched, nemen geen bandbreedte meer en houden je tf-tree eenvoudig en voorspelbaar. Dynamische transforms veranderen continu in tijd, bijvoorbeeld map->odom, odom->base_link of jointposes van een arm.
Die publiceer je periodiek op /tf met een tijdstempel, zodat de tf2-buffer op exact het juiste moment kan interpoleren en je sensorgegevens netjes aligneren. Richtlijnen: maak alles wat echt vast is statisch, update dynamische ketens met een stabiele frequentie, gebruik correcte parent-child richting en blijf consistent in frame-namen en assen.
[TIP] Tip: Gebruik consistente frame-namen: base_link, odom, map; documenteer parent-child relaties.

TF in de praktijk: opzetten en debuggen
Zo zet je TF2 snel en robuust op, en vind je fouten zonder tijd te verliezen. Richt je op helder publiceren, correct lezen en gericht debuggen.
- Publiceren: gebruik StaticTransformBroadcaster voor vaste montage-offsets (bijv. camera->chassis) en TransformBroadcaster voor dynamiek (bijv. odom->base_link); laat robot_state_publisher je URDF-joints automatisch als transforms uitsturen. Zorg dat frame_id en child_frame_id kloppen, hanteer één consistente keten (bijv. map->odom->base_link->sensor_frames), en publiceer met stabiele frequentie en correcte timestamps zodat de buffer kan interpoleren.
- Lezen: werk met tf2_ros Buffer + TransformListener (of de Python-variant) en vraag transforms op met canTransform/lookupTransform inclusief timeout. Respecteer timestamps (vraag “nu” of een specifieke tijd) en gebruik tf2-helpers (bijv. doTransform/geometry helpers) om poses, vectors en point clouds betrouwbaar te transformeren.
- Visualiseren en debuggen: start in RViz met het TF-display en controleer of assen (X rood, Y groen, Z blauw) en posities logisch zijn. Genereer je boom met view_frames om loops of ontbrekende paden te vinden en gebruik tf_echo om live te verifiëren of een transform beschikbaar is op het juiste tijdstip; typische fouten zijn omgedraaide parent-child-relaties, ontbrekende statische offsets en instabiele tijd/klok-instellingen.
Volg dit stappenplan bij elke nieuwe robot of sensor en je TF-tree blijft voorspelbaar en stabiel. Zo leg je een solide basis voor navigatie, SLAM en kalibratie.
Transforms publiceren en lezen (broadcaster en listener)
In tf2 publiceer je dynamische relaties met een TransformBroadcaster en vaste offsets met een StaticTransformBroadcaster. Je stuurt een TransformStamped met correcte header.stamp, frame_id (parent) en child_frame_id (child), waarbij je altijd de pose van het child ten opzichte van de parent publiceert. Voor dynamiek houd je een stabiele frequentie aan zodat de buffer kan interpoleren; statische transforms publiceer je één keer.
Aan de leeskant maak je een tf2_ros::Buffer met een TransformListener die het buffer vult, en vraag je met lookupTransform de gewenste relatie op tussen target- en source-frame, liefst met een timeout om te voorkomen dat je code blokkeert. Let op tijdsynchronisatie (zelfde klok, sim-time indien nodig) en consistente naamgeving, anders krijg je extrapolation of “frame not found” fouten.
Visualiseren en debuggen met RVIZ, tf_echo en view_frames
In RViz start je met het instellen van de Fixed Frame (meestal map of odom) en voeg je het TF-display toe om assen en frameposities te zien; kloppende kleuren en oriëntaties laten meteen zien of je assenconventies consistent zijn. Combineer dit met sensordata (bijv. point cloud) om te checken of alles op de juiste plek valt. Met tf_echo controleer je live of een transform beschikbaar is, hoe vaak hij update en of de tijdstempels vers zijn; extrapolation of “lookup would require extrapolation” wijst op timingproblemen.
Met view_frames genereer je een overzicht van je tf-tree met updatefrequenties en statische randen, zodat je snel dubbele roots, ontbrekende verbindingen of geïsoleerde subtrees spot. Zo vind je systematisch naam-, tijd- en topologiefouten.
[TIP] Tip: Synchroniseer robotklokken; tijdstempelmismatches breken TF, controleer met rviz.
Toepassingen en best practices
TF2 is de lijm tussen sensoren, actuatoren en algoritmes. Hieronder concrete toepassingen en beproefde werkwijzen die in de meeste robots terugkomen.
- Navigatie en SLAM: transformeer LIDAR- en cameradata naar base_link of map zodat costmaps kloppen; laat odometrie odom->base_link publiceren en laat lokalisatie/SLAM de koppeling map->odom verzorgen; gebruik doTransform om sensormetingen naar één target frame te brengen en voorkom dat algoritmes per sensor in een ander referentiekader werken.
- Manipulatie en camerakalibratie: hanteer een keten van base_link naar tool0/end_effector; koppel camera_link via hand-eye kalibratie (als statische transform) zodat gedetecteerde objecten direct als pick-pose in het taakframe bruikbaar zijn; transformeer grasppunten, markers en bounding boxes consequent naar het werkframe.
- Performance- en nauwkeurigheidstips: kies een duidelijke root en behoud de keten map->odom->base_link->sensor_frames; publiceer vaste relaties met StaticTransformBroadcaster en laat robot_state_publisher je URDF-joints publiceren; vermijd dubbele/cyclische edges, gebruik consistente framenamen en tijdstempels, buffer en synchroniseer data om extrapolatie te voorkomen, en transformeer zo vroeg mogelijk naar het doel-frame om rekentijd en fouten te beperken.
Met deze patronen blijft je TF-tree voorspelbaar en schaalbaar. Zo combineer je sensordata betrouwbaar en voorkom je frame-mismatches in productie.
Navigatie en SLAM
Voor navigatie en SLAM draait alles om consistente transforms tussen map, odom en base_link. Je odometrie (wielen/IMU) publiceert odom->base_link voor een vloeiende, lokale pose, terwijl je SLAM- of localisatiepakket map->odom publiceert om drift te corrigeren en loop closures te verwerken. Je transformeert lidar- of cameradata naar een doel-frame (vaak base_link voor lokale planners en map voor globale costmaps) zodat detectie, planning en controle dezelfde referentie gebruiken.
Zorg dat sensorframes statisch en correct zijn uitgelijnd, dat je tijdstempels kloppen en dat je tf2-buffer genoeg geschiedenis heeft om vertragingen te overbruggen. Publiceer nooit map->base_link direct, want dan breek je de scheiding tussen lokale en globale fouten. In RViz kies je het juiste Fixed Frame (meestal map) om je kaarten, poses en paden betrouwbaar te beoordelen.
Manipulatie en camerakalibratie
Voor goede manipulatie heb je een betrouwbare keten van frames nodig, meestal base_link via de armjoints naar tool0 of end_effector, plus een correct uitgelijnde camera_link. Met camerakalibratie leg je twee dingen vast: intrinsics (eigenschappen van de camera zoals brandpuntsafstand en lensvervorming) en extrinsics (de 3D-relatie tussen camera en robot). Bij hand-eye calibratie bepaal je de vaste transform tussen camera_link en het gereedschap of de mount; die publiceer je als statisch, terwijl de arm zelf dynamisch beweegt.
Met die relatie kun je een gedetecteerd object in camera-coördinaten direct omrekenen naar tool0 of base_link en zo een pick-pose plannen in MoveIt. Let op consistente parent-child richting, juiste tijdstempels en REP-103 assen, anders stapelt fout je fout op tijdens het grijpen.
Performance- en nauwkeurigheidstips
Haal meer uit tf2 door je updatefrequenties af te stemmen op de dynamiek: 30-60 Hz is vaak genoeg voor odom->base_link, terwijl IMU of armjoint-transforms sneller mogen; vaste offsets publiceer je één keer op /tf_static. Gebruik consistente tijdstempels en synchroniseer klokken (sim_time of NTP/chrony) om extrapolation te voorkomen. Geef je buffer genoeg geschiedenis maar niet te veel; 0,5-2 s werkt meestal goed. Normaliseer quaternions en vermijd onnodige Euler-conversies. Houd je tf-tree slank en eenduidig: één bron per keten, geen dubbele publishers.
Laat robot_state_publisher de jointtransforms doen in plaats van elk joint zelf te broadcasten. Transformeer sensordata vroeg naar je doel-frame met doTransform om ketens te verkorten. Kies double-precision waar nodig, houd eenheden consistent en optimaliseer queue sizes en intra-process communicatie om latentie te drukken. Monitor met tf_echo en view_frames of frequenties en stempels kloppen.
Veelgestelde vragen over tf robot
Wat is het belangrijkste om te weten over tf robot?
TF/TF2 vormt het coördinaten-ruggengraat van ROS: het beheert real-time transformaties tussen frames zoals map, odom, base_link en camera. Gebruik TF in ROS1, TF2 in ROS2; onmisbaar voor navigatie, manipulatie en sensorfusie.
Hoe begin je het beste met tf robot?
Begin met een consistente TF-tree: definieer parent-child relaties (map->odom->base_link->camera). Publiceer statische transforms met static_transform_publisher, dynamische via een broadcaster. Valideer met tf_echo, genereer view_frames, en visualiseer pijlen/axes in RViz.
Wat zijn veelgemaakte fouten bij tf robot?
Veelgemaakte fouten: verwisselde parent/child-richting, inconsistente frame_ids, verkeerde eenheden (meters/radianen), ontbrekende timestamps of te korte TF-buffer (extrapolation). Ook: TF-API gebruiken in ROS2 (i.p.v. TF2), ontbrekende continuous broadcasters, en vergeten frame-conventies.